车载控制层
车载控制层是AGV的核心,负责实现具体的运动控制和导航功能。主要包括以下模块:
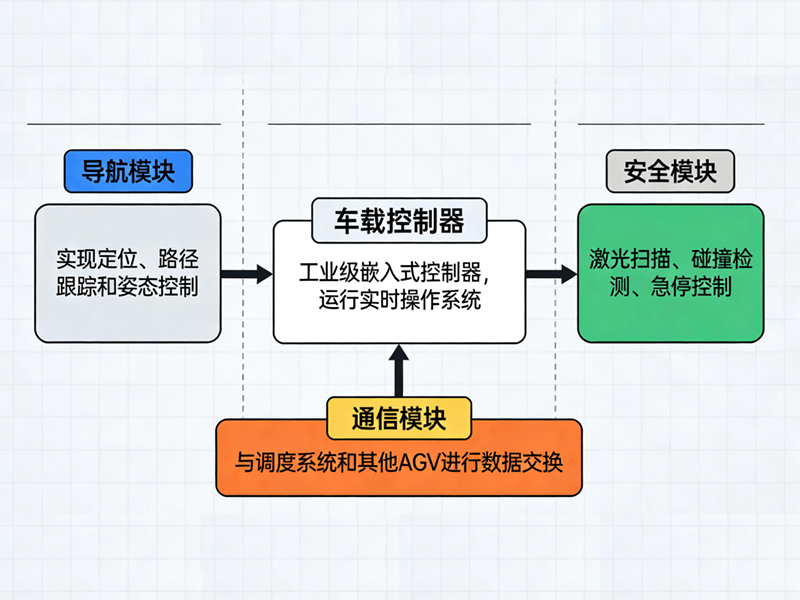
车载控制器
工业级嵌入式控制器,运行实时操作系统
导航模块
实现定位、路径跟踪和姿态控制
安全模块
激光扫描、碰撞检测、急停控制
通信模块
与调度系统和其他AGV进行数据交换
了解AGV系统的整体架构和核心组成部分
AGV系统通常采用三层架构模型,包括调度管理层、车载控制层和设备执行层。这种分层设计使得系统结构清晰,便于维护和扩展。
良好的架构设计应遵循模块化原则,各层之间通过标准接口通信,确保系统的可扩展性和可维护性。
调度管理层是AGV系统的大脑,负责任务分配、路径规划、交通管理、数据分析等功能。主要组件包括:
车载控制层是AGV的核心,负责实现具体的运动控制和导航功能。主要包括以下模块:
工业级嵌入式控制器,运行实时操作系统
实现定位、路径跟踪和姿态控制
激光扫描、碰撞检测、急停控制
与调度系统和其他AGV进行数据交换
高效的任务调度是AGV系统运行的关键
任务分配策略决定了如何将搬运任务分配给合适的AGV。常见策略包括:
不同类型的任务可以设置不同的优先级,确保重要任务优先执行:
任务队列管理负责维护和优化待执行任务的顺序:
智能路径规划确保AGV高效、安全地完成任务
AGV路径规划算法的选择直接影响系统的效率和性能。以下是几种常用的路径规划算法:
| 算法 | 特点 | 适用场景 | 复杂度 |
|---|---|---|---|
| A*算法 | 启发式搜索,效率高 | 静态环境,已知地图 | O(b^d) |
| Dijkstra | 保证最优解 | 小规模网络 | O(V^2) |
| D* Lite | 动态重规划 | 动态环境 | O(N log N) |
| RRT | 快速随机树 | 复杂环境 | O(N log N) |
对于固定路径的AGV系统,A*算法是最佳选择;对于需要频繁调整路径的动态环境,建议使用D* Lite算法。
全局路径规划在AGV出发前计算从起点到终点的完整路径。它考虑地图信息和静态障碍物,生成最优的行驶路线。
局部路径规划在AGV行驶过程中实时调整路径,应对动态障碍物和突发情况。
精确的运动控制是AGV稳定运行的基础
差速驱动是最常见的AGV驱动方式,通过控制左右驱动轮的速度差来实现转向。这种结构简单、控制灵活,广泛应用于各类AGV。
AGV的运动学模型描述了车轮速度与车身运动状态之间的关系。对于差速驱动AGV,主要参数包括:
运动控制精度受编码器分辨率、控制周期、轮胎打滑等因素影响,需要在系统设计时综合考虑。
通过PID算法实现精确的速度闭环控制,确保AGV按设定速度行驶。
通过编码器和导航传感器实现精确的位置控制,确保AGV准确到达目标点。
通过控制左右轮速度差实现平滑转向,避免打滑和轨迹偏差。
实时调整AGV姿态,确保严格沿规划路径行驶,减小轨迹偏差。
多AGV协同运行需要完善的交通管理策略
将地图划分为多个区域,同一时间只允许有限数量的AGV进入特定区域,避免拥堵。
在路径交叉点实施严格的管理策略,防止AGV在路口发生碰撞。
当检测到障碍物时,AGV需要及时采取避障措施,确保安全通行。